打开


agv移动机器人论文和图纸
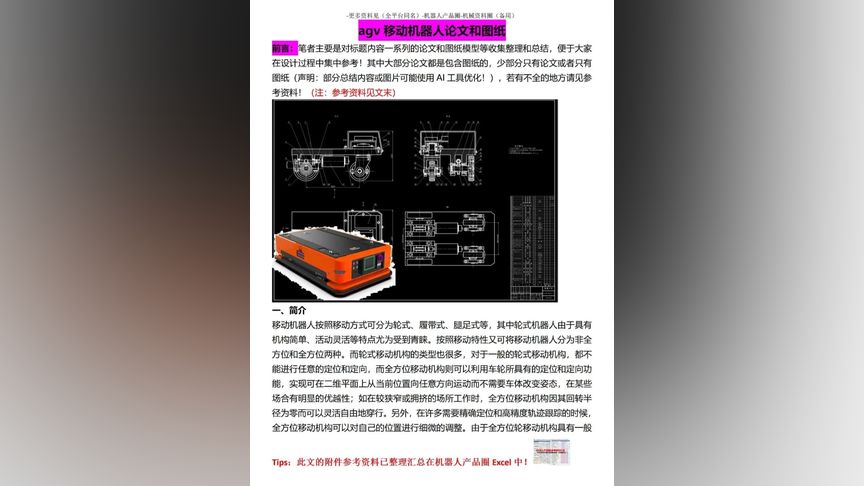
移动机器人按照移动方式可分为轮式、履带式、腿足式等,其中轮式机器人由于具有机构简单、活动灵活等特点尤为受到青睐。按照移动特性又可将移动机器人分为非全方位和全方位两种。而轮式移动机构的类型也很多,对于一般的轮式移动机构,都不能进行任意的定位和定向,而全方位移动机构则可以利用车轮所具有的定位和定向功能,实现可在二维平面上从当前位置向任意方向运动而不需要车体改变姿态,在某些场合有明显的优越性;如在较狭窄或拥挤的场所工作时,全方位移动机构因其回转半径为零而可以灵活自由地穿行。另外,在许多需要精确定位和高精度轨迹跟踪的时候,全方位移动机构可以对自己的位置进行细微的调整。由于全方位轮移动机构具有一般轮式移动机构无法取代的独特特性,对于研究移动机器人的自由行走具有重要意义,成为机器人移动机构的发展趋势。 #agv机器人 #agv设计 #agv论文 #agv图纸